パテントマップ
パテントマップの概要
パテントマップとは、特許情報を整理・分析・加工し、図面、グラフ、表などの形で視覚的に表したものです。特許情報を、目的に応じて読み取りやすく整理した資料であるといえます。
パテントマップは、次の2つに大きく分類できます。
1、統計型(データ型)
特許情報の書誌事項等を用いて統計的に解析し、グラフ等で表現するものです。主として100件以上の大量の特許情報を対象とします。
2、リスト型(内容型)
個々の特許文献の内容に着目し、技術内容、権利範囲、出願人ごとの特徴等を一覧化して把握しやすくするものです。少数から中規模の母集団について、内容面の比較や整理を行う場合に有用です。
- 発明の本質的特徴の把握
- 権利範囲や限定内容の比較
- 技術内容の整理・対比
- 個別文献の強み・弱みの検討
統計型パテントマップの種類
1、ランキングマップ
図1.ランキングマップ
出願件数、登録件数、発明者数、分類数等について、件数順に並べて表示するものです。
目的
- 多くの技術分野へ展開している出願人を見る
- 特定技術分野における主要出願人を把握する
- 主要発明者や注力主体を把握する、など
2、シェアマップ
図2.シェアマップ
が開きます")
目的
- 出願人の占有率を見る
- 発明者の占有率を見る、など
3、時系列マップ
時系列マップは、時間の経過に伴う出願件数や技術動向の変化を表すものです。バブルグラフ等を用いることにより、各データの時間的変化と比率を同時に読み取ることができます。
図3.時系列マップ
が開きます")
目的
- 技術分野の開発の進展状況を見る
- 出願人別の技術開発動向を出願件数で見る
- 発明者ごとの開発の進展状況を見る
- 分類別技術開発進展状況を把握する、など
4、マトリクスマップ
図4.マトリクスマップ
目的
- 技術と技術の相関関係を見る
- 共同出願関係の有無と件数を見る
- 出願人の技術展開・技術範囲を見る
- 技術分野に関連する技術への各社の参入状況を見る、など
5、コリレーションマップ
(a)分類相関マップ
第一発明情報(主)と第二発明情報(副)との間に存在する関係を見るものです。
(b)出願人相関マップ
共同出願人のランキングを見るものです。
(c)発明者相関マップ
共同発明者のランキングを見るものです。
図5.コリレーションマップ
が開きます")
目的
- 同一項目(技術、出願人、発明者)の関わりを見る、など
6、ニューエントリー・リタイアリマップ
図6.ニューエントリー・リタイアリマップ
目的
- 分類ごとの新規技術、参入技術を見る
- 陳腐化した技術分野を見る
- 撤退出願人の時期を見る
- 発明者等の撤退状況を見る、など
7、ポートフォリオマップ
図7.ポートフォリオマップ
が開きます")
目的
- 技術の伸びをライフサイクル、伸び率、構成比、伸び比で見る、など
8、グロスレイトマップ
図8.グロスレイトマップ
が開きます")
目的
- 高成長してきた出願人を見る
- 盛んに開発されている技術分野を見る
- 盛んに開発している技術者を見る、など
9、ユニークデータマップ
ユニークデータマップは、母集合においてユニーク(唯一)なデータを件数の多い順又は少ない順に並べたものです。特定の出願人や発明者だけが行っている技術を見出すことができます。主として縦・横棒グラフ又は折れ線グラフを用います。
図9.ユニークデータマップ
が開きます")
目的
- 特定の対象における技術(キーワード、IPC等)又は固有な表現等を見る、など
10、コンパラマップ
コンパラマップは、母集合において特定の2つのデータを比較して表示したものです。指定した項目を縦軸に表示し、特定の2つのデータを比較します。特定の出願人や発明者の間で技術項目等の優劣を把握することができます。縦・横棒グラフ又は折れ線グラフを用います。
図10.コンパラマップ
が開きます")
目的
- 指定の出願人、発明者等の技術等を比較・対照して見る、など
11、サイテーションマップ
サイテーションマップは、母集合において特許情報と引用情報又は被引用情報とのつながりを視覚化したものです。その技術分野における先導的な技術や重要な技術を見出すことができます。主としてパテントチャートを用います。
図11.サイテーションマップ
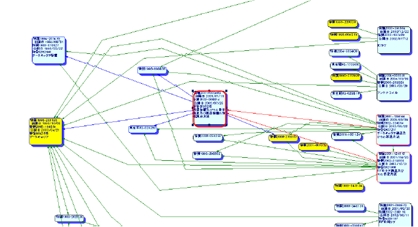
目的
- 参考文献や経過情報の引用文献等から、特許同士の引用・被引用関係を洗い出し、特許同士のつながりを見出す、など
参考資料
- 技術分野別特許マップ「機械6 焼却炉技術」の「特許マップとは」
- パテントマップの全知識、発行所:(株)パテントテック社
パテントマップ作成サービスの詳細につきましては、お気軽に当事務所までご相談ください。